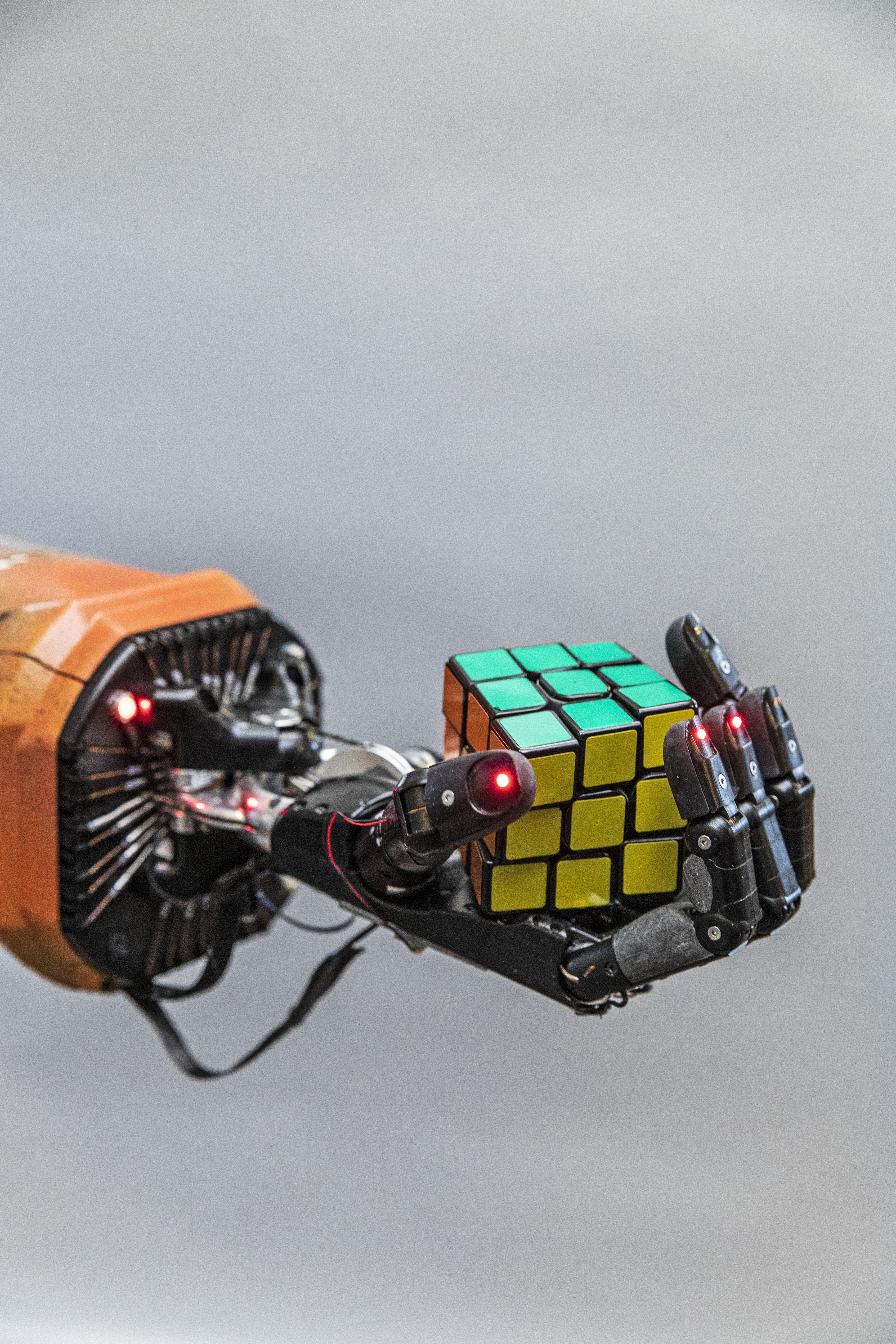
SAN FRANCISCO — La semana pasada, en el tercer piso de un pequeño edificio ubicado en el distrito La Misión de San Francisco, una mujer mezcló los mosaicos de un cubo de Rubik y lo colocó sobre la palma de una mano robótica.
La mano comenzó a moverse, girando los mosaicos cautelosamente con su pulgar y sus cuatro largos dedos. Cada movimiento era pequeño, lento e inestable. Sin embargo, pronto, los colores comenzaron a alinearse. Cuatro minutos después, con un giro final, ordenó los últimos mosaicos, y una larga fila de investigadores que observaban de cerca estalló en un grito de celebración.
Los investigadores trabajaban para un prominente laboratorio de inteligencia artificial, OpenAI, y habían pasado varios meses entrenando a su mano robótica para que lograra esta tarea.
Aunque podría descalificarse como un truco para llamar la atención, el logro fue un avance en la investigación robótica. Muchos investigadores creen que fue un indicador de sus capacidades para entrenar máquinas a fin de que puedan hacer labores mucho más complejas. Esto podría producir robots en los que se puede confiar para ordenar paquetes en una bodega o autos capaces de tomar decisiones por sí solos.
“Resolver un cubo de Rubik no es muy útil, pero demuestra lo lejos que podemos llevar estas técnicas”, dijo Peter Welinder, uno de los investigadores que trabajaron en el proyecto. “Vemos esto como un camino para construir robots que puedan manejar una gran variedad de tareas”.
El proyecto era también un mecanismo de promoción para OpenAI en su búsqueda por atraer el dinero y el talento necesarios para avanzar en este campo de investigación. Las técnicas desarrolladas en laboratorios como OpenAI tienen costos enormes —tanto en equipo como en personal— y, por lo tanto, las demostraciones llamativas se han vuelto esenciales para la investigación formal de la inteligencia artificial.
El truco es separar lo vistoso de la demostración del proceso tecnológico y entender las limitaciones de esta tecnología. Aun cuando la mano de OpenAI puede resolver el problema en tan solo cuatro minutos, deja caer el cubo ocho de cada diez veces, dijeron los investigadores.
“Este es un avance interesante y positivo, pero es muy importante no exagerarlo”, mencionó Ken Goldberg, profesor de la Universidad de California, campus Berkeley, quien explora técnicas similares.
Un robot que puede resolver un cubo de Rubik no es algo nuevo. Investigadores ya habían diseñado máquinas específicamente con este fin —dispositivos que no se parecen en nada a una mano—, las cuales pueden resolver el rompecabezas en menos de un segundo. No obstante, la construcción de aparatos que funcionen como una mano humana es un proceso exhaustivo en el que los ingenieros pasan meses estableciendo reglas para definir cada diminuto movimiento.
El proyecto de OpenAI se sintió como un logro porque sus investigadores no programaron cada movimiento de su mano robótica. Eso podría tomar décadas, si no es que siglos, considerando la complejidad de un dispositivo mecánico que tiene un pulgar y cuatro dedos. Los investigadores del laboratorio crearon un sistema de cómputo que aprendió a resolver el cubo de Rubik, en gran medida, por sí mismo.
“Lo emocionante de este trabajo es que el sistema aprende”, dijo Jeff Clune, profesor de robótica en la Universidad de Wyoming. “No memoriza una manera de resolver el problema. Aprende”.
El desarrollo empezó con una simulación tanto de la mano como del cubo, una recreación digital del hardware en el tercer piso de las oficinas centrales de OpenAI en San Francisco. Dentro de la simulación, la mano aprendió a resolver el rompecabezas mediante un proceso extremo de prueba y error. Pasó el equivalente a 10.000 años girando mosaicos de arriba a abajo, de izquierda a derecha, completando la tarea una y otra vez.
Los investigadores cambiaron la simulación al azar, poco pero significativamente. Cambiaron el tamaño de la mano, el color de los mosaicos y la cantidad de fricción entre los mosaicos. Después del entrenamiento, la mano aprendió a enfrentar lo inesperado.
Cuando los investigadores transfirieron este conocimiento computarizado a la mano física, fue capaz de resolver el problema por su cuenta. Gracias a la introducción del azar en la simulación, fue capaz de resolverlo incluso con un guante de hule o con dos dedos atados.
En OpenAI y laboratorios similares en Google, la Universidad de Washington y Berkeley, muchos investigadores creen que este tipo de “aprendizaje automático” ayudará a los robots a dominar tareas que hoy no dominan y hacer frente al azar del mundo físico. En este momento, no se puede confiar en que un robot sea capaz de ordenar un bote de objetos variados mientras se mueve dentro de una bodega.
Se espera que pronto eso sea posible. Sin embargo, lograrlo es caro.
Por eso OpenAI, liderado por el gurú de las empresas emergentes de Silicon Valley, Sam Altman, hace poco tiempo firmó un acuerdo de 1000 millones de dólares con Microsoft. Y esa es la razón por la cual el laboratorio quería que el mundo viera una demostración de su mano robótica mientras resolvía un cubo de Rubik. El martes, el laboratorio publicó un artículo de 50 cuartillas en el que describió la ciencia detrás del proyecto. También distribuyó un comunicado de prensa a medios informativos de todo el mundo.
“Si quieren mantener esta operación andando, eso es lo que tienen que hacer”, dijo Zachary Lipton, profesor del grupo de aprendizaje automático de la Universidad Carnegie Mellon en Pittsburgh. “Eso los mantendrá con vida”.
Cuando The New York Times revisó una versión inicial del comunicado de prensa, pedimos ver la mano en acción. En el primer intento, la mano dejó caer el cubo a los pocos minutos de haberlo comenzado a girar. Un investigador volvió a colocar el cubo en su palma. En el siguiente intento, resolvió el rompecabezas sin ningún problema.
c. 2019 The New York Times Company
